The first 3-D Zoetrope of a metamorphosis of the Costa Minimal Surface, proposed by the artist in 1999, has gone on to win an international award in digital sculpture and has been exhibited in several venues.

This second proposal depicts the three-dimensional projection of an object rotating in four complex spatial dimensions. The artist proposes to render the individual "frames" of the animation in physical materials, in three physical dimensions and in directly modeled-in color. The proposed method of execution is to employ the color computer-aided rapid mechanical prototyping or "3-D Printing" technique developed by the Z Corporation, Burlington, MA.
In this zoetrope, sixty phases of the object which transforms are attached to the edge of a wheel. The rotation of the wheel is "frozen" using a stroboscopic white light, optically synchronized to the "spokes" of the wheel where the objects project from its edge.
The subject can be described in several ways. It is a superquadric surface parameterized in the complex plane, by Andrew Hanson. (Note: Constants E, I and functional notation are from Mathematica.)
u1[a_,b_] := .5 (E(a + I*b) + E(- a - I*b))
u2[a_,b_] := .5 (E(a + I*b) - E(- a - I*b))
z1k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u1[a,b](2.0/n)
z2k[a_,b_,n_,k_] := E(k*2*Pi*I/n)*u2[a,b](2.0/n)
{x, y, z} -> { Re[z1k[a,b,n,k1]],
a: (-1.0,1.0); b:(0, Pi/2);
The surface is composed of n x n patches, each parameterized in the
domain (a, b). The structure and complexity of the surface is characterized
by the exponent, n.
n = 5;
alpha = (0.25 + frame/60) Pi
The real axes are mapped to (X, Y) while the imaginary axes are projected into
the depth (Z) dimension after rotation by the angle alpha.
This mathematical system can also be described as the
Complex Projective Varieties Determined by
xn + yn = zn
(the n=5 case of Fermat's Last Theorem)
or the Calabi-Yau 2D cross-section of
the 6D manifold embedded in CP4 described in string theory
calculations by the homogeneous equation in five complex variables:
The surface is computed by assuming that some pair of complex
inhomogenous variables, say z3/z5 and z4/z5, are constant (thus
defining a 2-manifold slice of the 6-manifold), normalizing the
resulting inhomogeneous equations a second time, and plotting the
solutions to z15 + z25 = 1 .
The angle of rotation in the projection from complex four-space into
three real dimensions is animated from 45 degrees to 405 degrees over
the span of sixty frames. Note that the object has two-fold rotational
symmetry in 4-D, because it only has to rotate 180 degrees to get to
a geometrically equivalent orientation with respect to the starting point
of our projection. However, the colored parameterization must rotate the
full 360 degrees to match its original orientation.
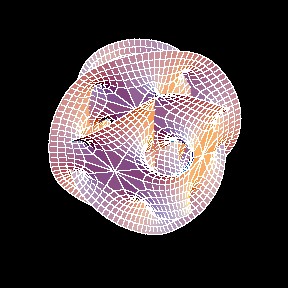
Each point on the surface where five different-colored patches come together
is a fixed point of a complex phase transformation; the colors are weighted
by the amount of the phase displacement in z1 (red) and in z2 (green)
from the fundamental domain, which is drawn in blue.
Thus the fact that there are five regions fanning
out from each fixed point clearly emphasizes the
quintic nature of this surface.
Five boundary curves of this surface can be identified.
There exist similarly structured surfaces for any exponent n.
The five-fold patching of the surface and number of boundary curves
is similarly extended for each value of n.
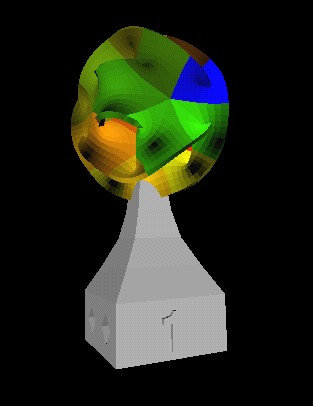
For the purposes of this sculpture, the animated pieces are each constructed
with an integral, standardized base. The base contains extruded numerals
identifying each unique phase of the animation. The base also contains
1/8" mounting holes at 1/2" centers, suitable for accepting 4-40 x 1-1/4"
machine screws for mounting the piece to the wheel.
As in the first
Zoetrope,
An Infrared LED and phototransistor pair are located on opposite sides of the
wheel rim, such that the base of each metamorphic piece will interrupt the beam
as it passes. This produces a TTL signal from the phototransistor as the wheel
rotates. An electronic timer circuit is used to tune the duration and phase
of the light pulse, but because it is optically locked to the wheel, it will
never drift, regardless of the speed at which the wheel rotates.
Because the subject of this Zoetrope itself contains information depicted by
the coloration of its surface, the object will be stroboscopically illuminated
with white light.
This piece demonstrates the concretization of natural mathematical language.
It transforms and casts an abstract system expressed in four complex spatial
dimensions into three real physical dimensions, and it does so allowing the
object to move in time. The motion depicts a three-dimensional shadow of
a 4-dimensional object, metamorphosing as it rotates in 4-space. This
allows us to see more of the entirety of an object expressed mathematically
in more than three dimensions.
k2: (0, n - 1)
k1: (0, n - 1)
 (364k MPEG Video)
(364k MPEG Video)
(1.2Mb SGI Movie)
(1.3Mb Quicktime)
z15 + z25 + z35 + z45 + z55 = 0
 (367k MPEG Video)
(367k MPEG Video)
(487k SGI Movie)
(632k Quicktime)
For further information, see: A.J. Hanson. A construction for computer visualization of certain complex curves. Notices of the Amer.Math.Soc.,
41(9):1156-1163, November/December 1994.
Software used to create this proposal: