Each cell will be able to exert a force on its neighboring cells in order to move itself relative to its neighbors. It is by the collective effect of small movements of individual cells relative to each other that the sculpture will dramatically change its shape at the large scale.
It may not be unreasonable to expect that each cell could detect mechanical force applied to it as well, giving it a tactile sense.
Each cell will have a means of modifying the color of light either reflected or transmitted from the surface of the cell. Each cell will then become a volume color element or "voxel" in the global sculpture. By modifying the color of the cells, it will be possible to generate a colored texture on the surface of the sculpture.
Each cell will have a means for detecting and spectrally discriminating light reaching the cell. This can mean the ability to detect colored light at each of the visible primary wavelengths as well as possibly infrared for detecting nearby heat sources. This ability should allow the sculpture to interact visually with its environment.
If each cell is capable of both transmitting and receiving spectrally distinct light from each of its surfaces, then a multi-channel optical transmission from cell to cell through the interior of the sculpture could be used as the internal data communication means for the structure.
It may not be unreasonable to further add the capability for audio transmission and reception as well. In addition to audio interaction, this could conceivably allow the sculpture to make phase-space reconstructions of its physical environment and a distributed echolocation capability.
The electrical, mechanical and data transmission interfaces between the cells will be such that a single plane of interface surfaces will serve as the mechanical anchor or base for the sculpture. This base will also serve as the power supply and the input/output data communication interface to a general-purpose host computer workstation, which will be the means by which the sculpture is programmed.
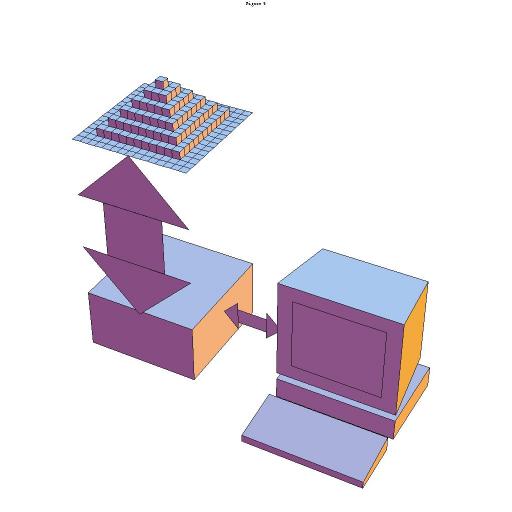
Figure 4 shows the overall proposed structure of the sculpture with a collection of cubic cells in a square pyramid configuration, resting on and fully interfaced to a 15 X 15 base plane of square cell-interface surfaces. There is a 15 X 15 addressable instruction and data multiplexer/demultiplexer, including power supply, connected to the 15 X 15 base interface plane. The multiplexer/demultiplexer is in turn connected by a narrower data channel to a general-purpose graphical computer workstation.
3-D Kinetic cellular Automaton -- Copyright 1995 Stewart Dickson
{kind=link}